


Real-time CAN to Ethernet interface for remote network access Kvaser Ethercan HS supports REST API and t programming
Price: Contact
| Model | EAN: 73-30130-00976-9 |
| Manufacturer | Kvaser |
| Power supply | PoE IEEE 802.3af or CAN +9V to +35V DC |
| Weight | 120 g |
| Size | 35 x 165 x 17 mm |
| Condition | Stocking |
| Warranty | 24 months |
Real-time CAN to Ethernet interface for remote network access Kvaser Ethercan HS makes it easy to implement the "Internet of Things" (IoT) concept by enabling data from any CAN product or system to be sent over a corporate network or WAN, using the standard Kvaser CANlib API. Users of the Kvaser Ethercan HS can also choose to connect to the device using the built-in REST API for web-enabled devices, such as smartphones.
As a programmable interface, the Kvaser Ethercan HS interface is suited to advanced applications, such as ECU reflashing. For example, a t program could be created to process CAN messages locally in the device, removing the latency of WiFi and/or Ethernet.
I. Major features of Real-time CAN to Ethernet interface Kvaser Ethercan HS
- Networked CAN interface with Kvaser t programmability.
- Supports ISO 11898-1 with both 11-bit and 29-bit CAN identifiers.
- Compatible with applications written for other Kvaser CAN hardware using Kvaser CANlib.
- One high-speed CAN connection (compliant with ISO 11898-2), 40 kbit/s up to 1 Mbit/s.
- Fully compatible with J1939, CANopen, NMEA 2000 and DeviceNet.
- Supports Kvaser REST API.
- Ethernet connection with auto-MDIX using a standard shielded RJ45 socket.
- Built-in Power over Ethernet (PoE), allows the device to receive both data and power over a single Ethernet cable.
- Small and lightweight plastic housing.

II. The t programming language
- The Kvaser t programming language is event oriented and modelled after C. It can be used to customize the behavior of the Kvaser Ethercan HS and other Kvaser t capable devices.
- A t program is invoked via hooks, which are entry points that are executed at the occurrence of certain events. These events can be, for example, the arrival of specific CAN messages or a timer expiration.
- Like any Kvaser CAN interface, the Kvaser Ethercan HS can be used via CANlib on a host computer. The addition of t programs running directly on the Kvaser Ethercan HS makes it possible to react much quicker to CAN bus events (for example to speed up file transfer protocols or to simulate missing hardware).
- For more information, see the Kvaser t Programming Language guide that can be downloaded at: kvaser.com/download.
III. Additional software and documentation cho Real-time CAN to Ethernet interface
- The Kvaser CANlib SDK includes everything you need in order to develop software applications interacting with Kvaser CAN and LIN hardware. The SDK contains full documentation and many sample programs, written in C, C++, C#, Delphi, Python and Visual Basic. Kvaser CAN and LIN hardware is built around the same common software API. Applications developed using one device type will run without modification on other device types.
- The latest versions of documentation, software and drivers can be downloaded for free at: kvaser.com/download.
IV. Kvaser Ethercan HS hardware
Hardware installation:
- The Kvaser Ethercan HS may be inserted into any free Ethernet socket. If the Ethernet socket does not support Power over Ethernet, power must be supplied on the CAN connector. For the Kvaser Ethercan HS to communicate with the host computer, a compatible version of the Kvaser driver and firmware must be installed. After the driver has been installed on the host computer, the firmware may then be downloaded and installed on the Kvaser Ethercan HS.
Network connector:
- The Kvaser Ethercan HS has a standard shielded RJ45 socket (STP) ethernet connector. Connect the Kvaser Ethercan HS to your network or directly to your host computer for first time configuration.

Ethercan Factory Reset Device:
- The Ethercan Factory Reset Device is used to reset the Kvaser Ethercan HS configuration.

CAN channels:
- The Kvaser Ethercan HS has one CAN Hi-Speed channel with a 9-pin D-SUB connector.
Power supply:
- The Kvaser Ethercan HS is powered either from the Ethernet connector using PoE or from the CAN connector. The Kvaser Ethercan HS is compliant with PoE IEEE 802.3af supporting both Mode A (endspan) and Mode B (midspan).
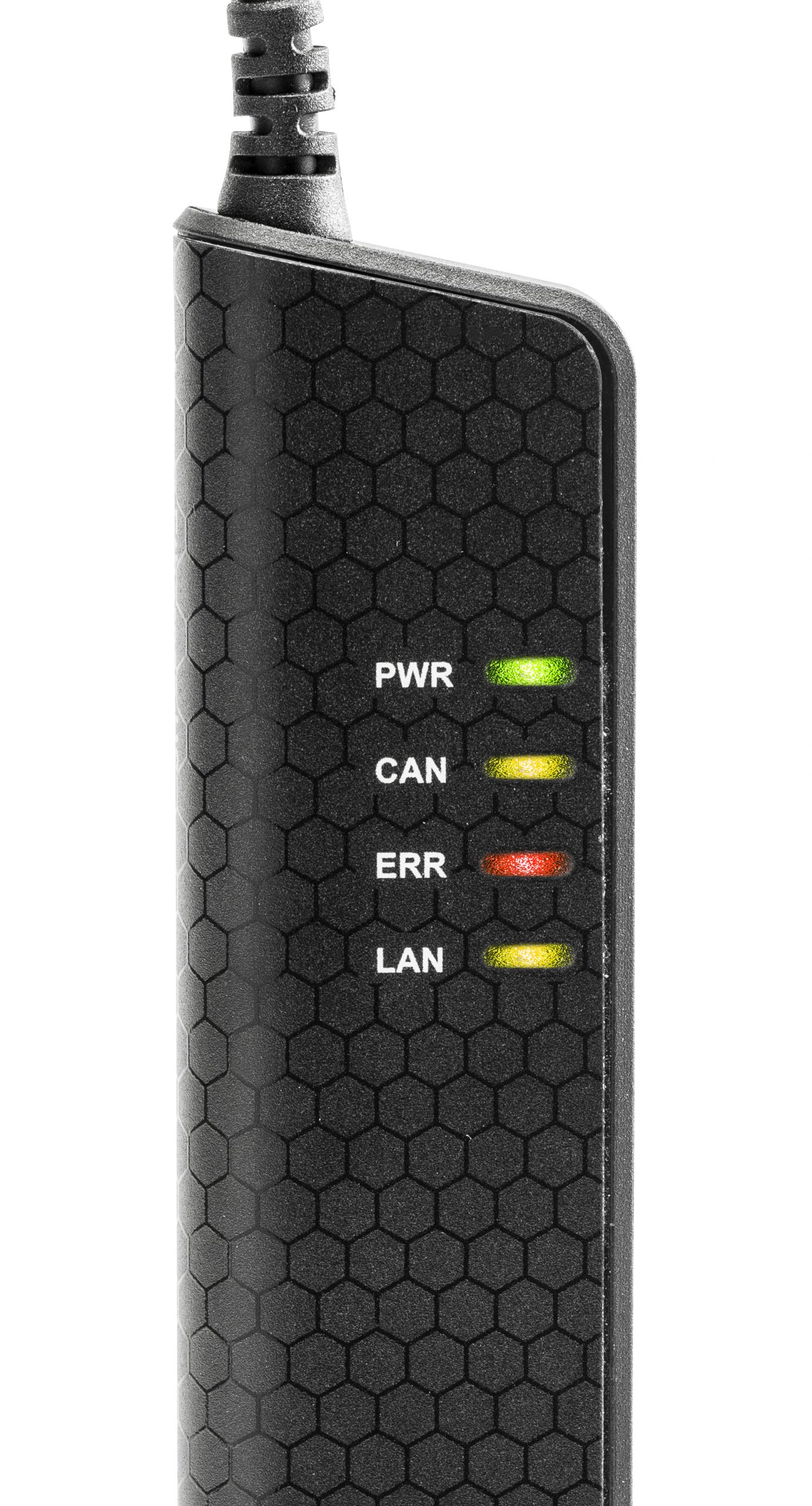
LED indicators:
The Kvaser Ethercan HS has four LEDs

|
LED |
General meaning |
| PWR (Green) |
Steady light when unit is powered and working. |
|
CAN (Yellow) |
CAN channel status. |
| ERR (Red) |
Indicates different types of errors. |
|
LAN (Yellow) |
LAN connection status. |
|
Fast flashing when waiting for DHCP lease. |
|
|
Slow flashing when ready for connection as remote device. |
|
|
Steady light when device is connected as a remote device. |
The ERROR LED indicator can give more information about the cause of failure
|
ERROR LED Signal |
Auxiliary Signal | General Meaning |
| Blink | CAN LED blinks |
CAN channel is in error passive mode |
|
Slower blink |
CAN LED blinks | CAN channel is bus off |
| Short flash | - |
Error frame detected |
Technical data of Real-time CAN to Ethernet interface for remote network access Kvaser Ethercan HS
|
CAN Channels |
1 |
| CAN Transceiver |
TJA1051T (Compliant with ISO 11898-2) |
|
CAN Bit Rate |
40 kbit/s up to 1 Mbit/s |
| Time stamp resolution |
25 μs |
|
Error Frame Detection |
Yes |
| Error Frame Generation |
No |
|
Silent mode |
No |
| Kvaser CANtegrity |
No |
|
Host interface |
Ethernet |
| Host OS |
Windows (7 or later) |
|
Ethernet interface |
Ethernet IEEE 802.3u 100BASE-TX |
| Ethernet connector |
Shielded RJ45 socket STP |
|
Galvanic isolation |
Yes |
| Power Supply |
PoE (Power over Ethernet) IEEE 802.3af or CAN +9V to +35V DC |
|
Power consumption |
Typical 1.2 W |
| Hardware configuration |
Done by software. |
|
Dimensions |
35 x 165 x 17 mm for body incl. strain relief |
| Weight |
120 g including cables and connectors. |
|
Operating temperature |
−20 ◦C to +70 ◦C |
| Storage temperature |
−40 ◦C to +85 ◦C |
|
Relative Humidity |
0 % to 85 % (non-condensing.) |
No comments yet
SIGN UP FOR A CONSULTATION
Please fill in the form below and send your comments and questions to GMGA, we will respond to your email as soon as possible.

COMMIT
100% new product

COMMIT
100% refund if the product is of bad quality and not as promised


DELIVERY
Nationwide
OTHER SAME PRODUCTS

Turbidimeter benchtop INESA REX WZS-188
Model: WZS-188

Time-Lapse IVF multi-room incubator Esco MIRI® II-12 Series MRI2-12C
Model: MIRI® II-12

Portable DO meter multifunction INESA REX JPBJ-609L
Model: JPBJ-609L
COD meter handheld multi-function INESA REX DGB-401
Model: DGB-401
Portable dissolved oxygen meter INESA REX JPBJ-608
Model: JPBJ-608

Benchtop shaker non-refrigerated Esco OrbiCult™ series IBS-NR
Model: IBS-NR Series
Versatile potentiometric titrator INESA REX ZDJ-4A
Model: ZDJ-4A

Karl Fischer titrators INESA REX ZDY-504
Model: ZDY-504

Turbidity meter handheld INESA REX WZB-175 / 170
Model: WZB-175 / 170

PCR thermal circulator Esco Aeris™ AERIS-MB series
Model: AERIS-BG096/ B4830/ BG384/ BD048 / B4076

Time-Lapse IVF incubator Esco MIRI ® series MRI-TL
Model: MRI-TL6 / MRI-TL12

Polymerase chain reactor cabinet Esco Streamline ® SCR-2A1 / SCR-2A2 / SCR-2A3
Model: SCR-2A1 / SCR-2A2 / SCR-2A3
Saturation meter DO ATC INESA REX JPB-607A
Model: JPB-607A
Shaker Esco Provocell™ Microplate
Model: PV-PVC-1/ PV-PVC-2

Portable oxygen meter INESA REX JPBL-610L
Model: JPBL-610L
Stirrer INESA REX JB-10 / JB-11
Model: JB-10/ JB-11

Orbital shaker Esco OrbiCult™ AS1-NC-19 / AS1-NC-25
Model: AS1 -NC-19 2200001/ AS1 -NC-25 2200003
Refrigerated shaker Esco OrbiCult™ series IBS-R benchtop
Model: IBS-R Series

Handheld versatile analyzer INESA REX DZB-712L
Model: DZB-712L

Handheld multiparameter analyzer REX DZB-712 high precision
Model: DZB-712

Review Real-time CAN to Ethernet interface for remote network access Kvaser Ethercan HS supports REST API and t programming
There are no reviews yet.